

リミットスイッチを配線しただけでは動作しない。
リミットスイッチを使用するパラメータを設定する。
初期値はどうなっているか?
Candleのコマンドラインから$$を入力する。

現在の設定内容が用事される。
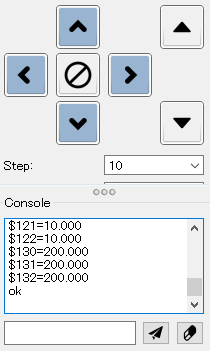
初期値
$0=10
$1=25
$2=0
$3=0
$4=0
$5=0
$6=0
$10=1
$11=0.010
$12=0.002
$13=0
$20=0
$21=0
$22=0
$23=2
$24=25.000
$25=500.000
$26=250
$27=1.000
$30=1000
$31=0
$32=0
$100=250.000
$101=250.000
$102=250.000
$110=500.000
$111=500.000
$112=500.000
$120=10.000
$121=10.000
$122=10.000
$130=200.000
$131=200.000
$132=200.000
リミットスイッチの動作とホーミングの設定
$21=1 ハードウェアリミットスイッチを有効にする $22=1 ホーミングサイクル設定 $23=3 ホーミングの際のXYZ軸の動く方向の設定 $24=25 リミットスイッチ手前で位置合わせする移動速度 $25=2000 リミットスイッチを探しに行く際の移動速度 $26=250 リミットスイッチを押した際のチャタリング防止用のディレイ時間 $27=1.000 ホーミング終了後、リミットスイッチから離れる距離
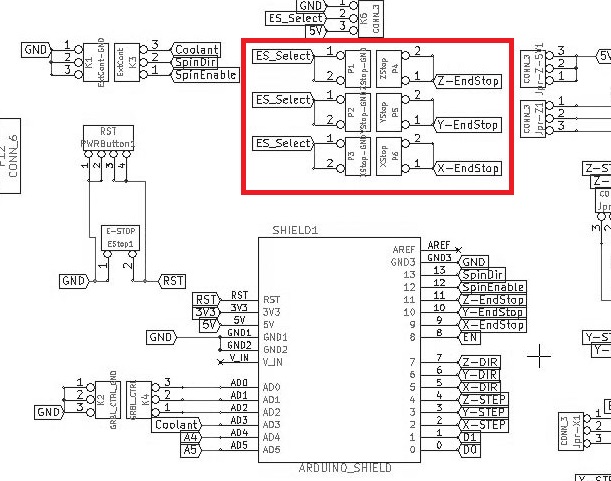
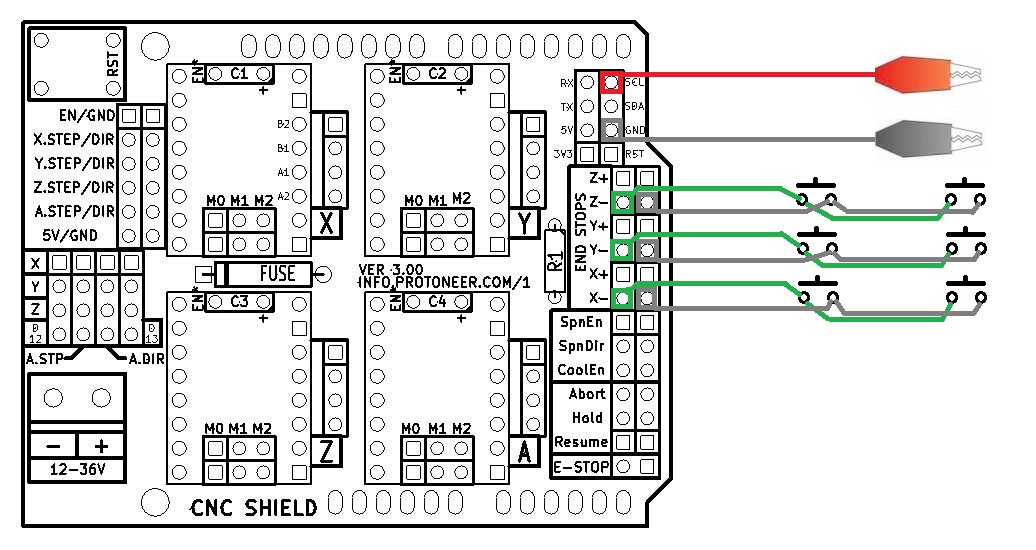
リミットスイッチは各軸の両端に設置するがX+とX-は基板上で短絡しているので、どちらかからの配線を分岐して使用可能。
プローブを使う
$6=0 常時OPEN 接触時SHORT 逆の場合は$6=1
基板が+側、スピンドル先端が-側になるように。
回路のGNDとモーターのケースは通常、導通していないので都度-側をクリップする必要があるが
モーターや、その他FG部をGNDすれば黒クリップは不要となる。
設定内容の詳細は以下を参照。